
RESEARCH
Innovations in Soft Robotics
MECHANICS
The kinematics and dynamics of soft robots are directly controlled by the mechanics of fluidic pressure inflating the soft deformable body. We are introducing soft robots that exploit these mechanics in order to slither like a snake and to safely grasp objects underwater like an octopus.

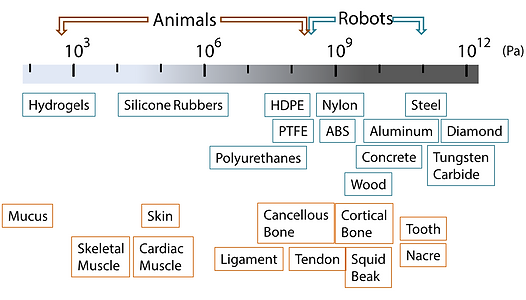
MATERIALS
The extreme performance requirements of soft robots drive the need for novel material capabilities. We are investigating electro-active materials that reversibly switch from solid to liquid phase, new elastomers for robots that biodegrade, and liquid metal alloys that serve as stretchable robot "nerves."
MANUFACTURING
Manufacturing robots out of soft materials requires fundamentally new approaches. We are creating open source 3D printers to directly manufacture soft robots out of inexpensive and widely available silicone rubbers.
